Plateforme drone de recherche et d'enseignement P450
Prometheus450 (P450 en abrégé) est une plateforme expérimentale de drones spécialement conçue pour les chercheurs scientifiques et les développeurs de drones. Il convient à la recherche et au développement de drones professionnels

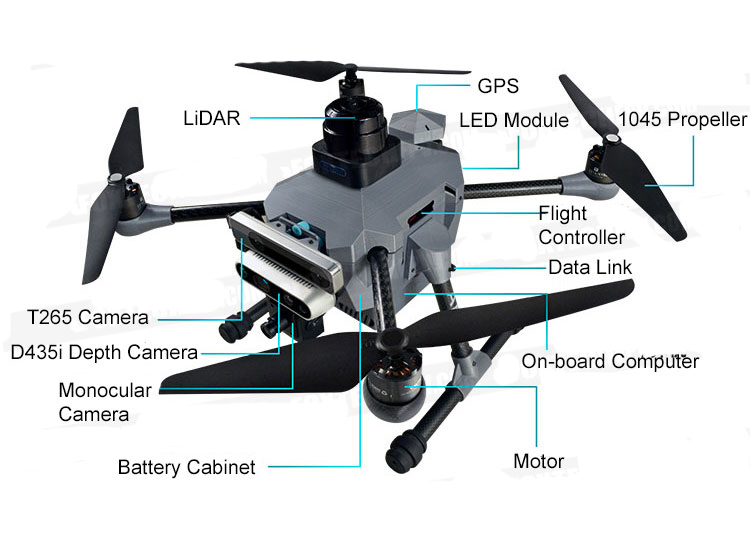
Description : Les capteurs du P450 incluent (caméra T265, lidar S1, JETSON Xavier NX, caméra de profondeur D435i, caméra monoculaire)
Plate-forme expérimentale UAV, adaptée à la recherche et au développement d'applications professionnelles UAV. Cette plateforme de développement est basée sur l'open source Prometheus
Project, fournissant des routines de démonstration riches, couvrant le module de contrôle, le module slam, le module de planification et le module de détection de cible, etc.
Un certain nombre de directions de recherche liées aux UAV et à la vision artificielle aident la recherche et le développement scientifiques sur les UAV et s'engagent à rendre la recherche et le développement plus efficaces.
Caractéristiques
Poids (environ) : 1550g (sans batterie), 1950g (avec batterie)
Taille : 335 mm * 335 mm * 230 mm (longueur * largeur * hauteur)
Empattement diagonal : 410 mm
Charge utile maximale : 1 600 g
Masse maximale au décollage : 3550g
Temps de vol maximum : Extérieur 13min39s ; Intérieur 10min23s ; Précision de vol stationnaire : ±1m (sous GPS) Classe de résistance au vent : 3-4
Environnement de travail : intérieur/extérieur
Température de travail : 6℃-40℃
Contrôle de vol :
Processeur FMU : STM32 F765
Accéléromètre : ICM-20699
Magnétomètre : IST8310
Sortie du module d'alimentation : 4,9 ~ 5,5 V
Processeur E/S : STM32 F100
Gyroscope : BMI055
Baromètre : MS5611
Entrée d'alimentation USB : 4,75 ~ 5,25 V
Poids : 158 g
Taille : 44*84*12mm
Micrologiciel : micrologiciel PX4
Température de fonctionnement : 40 ~ 85 degrés
Ordinateur de bord
Modèle : Jetson Xavier NX
Taux de hachage : 21 TOPS
Processeur : NVIDIA Carmel ARM v8.2 64 bits à six cœurs
GPU : architecture NVIDIA Volta, 384 cœurs NVIDIA CUDA + 48 cœurs Tensor
Stockage : 64 Go
RAM : 8 Go DDR4
Affichage : mini-HDMI
Interface : mini-PCIe*1 ; USB 3.0 TypeA*1 ; USB 2.0 TypeA*1 ; Micro-USB*1 ; Port Ethernet*1 Autres : Multiplexage SPI+GPIO*1 ; I2C ; UART
Batterie :
Modèle : 4S 4000mah 1 pièce
Capacité effective : 4000 mAh
Poids de la batterie : 374 g
Tension d'utilisation : 14,8 V-16,8 V
Tension minimale : 14,8 V
Tension de stockage : 15,2 V
Interface batterie : XT60
Type de batterie : batterie au lithium LIPO
Température de travail : 0℃-60℃
Télécommande :
FS-i6S
Caméra binoculaire :
Modèle : Intel Real Sense T265
Puce : Movidius Myraid2
Champ de vision : Deux lentilles fisheye combinées à un 163±5 presque hémisphérique.
IMU : l'unité de mesure inertielle BMI055 permet une mesure précise de la rotation et de l'accélération de l'appareil
Caméra de profondeur :
Modèle : Intel Real Sense D435i
Technologie de profondeur : Stéréo infrarouge actif
Résolution de sortie du flux de profondeur : jusqu'à 1280*720
Fréquence d'images de sortie du flux de profondeur : jusqu'à 90 ips
Distance de profondeur minimale : 0,1 m
Lidar :
Modèle : LDS-50C
Technologie de télémétrie laser : TOF
Rayon de mesure : 0,15 m ~ 40 m
Vitesse d'échantillonnage : 9200 fois/seconde
Précision de télémétrie : 2 ~ 10 cm (valeur typique 5 cm)
Résolution de distance : 1 cm
Angle de balayage : 360°
Fréquence de balayage : 7~15Hz (valeur typique 10Hz)
Caméra monoculaire :
Modèle : caméra monoculaire USB
Focale : 3,6 mm
Champ de vision : 90°
Pixels : 2 millions
Résolution maximale : 1920*1080
Paramètres du logiciel
PC de bord :
Modèle : Jetson Xavier NX
Système : Ubuntu 18.04 Nom d'utilisateur : amov Mot de passe : amov
Jet pack : 32.4.3
Cuda : 10,2
ROS : mélodique
opencv : 3.3.1
SDK realsense : 2.2.36
ROS sens réel : 2.2.15
Logiciel Prometheus :
version:v1.0-stable
5 :Caractéristiques
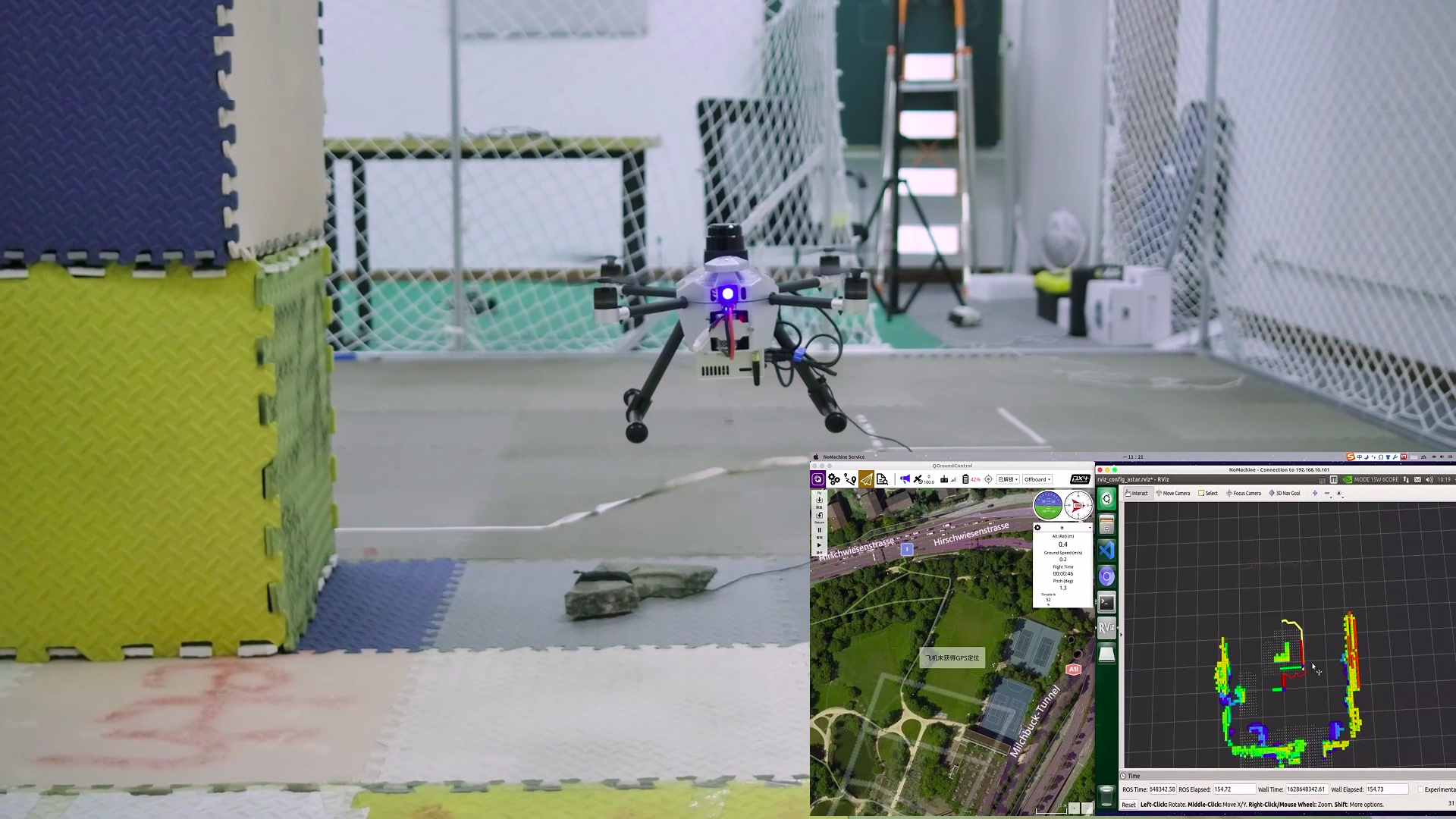
Partie logicielle : Le système prometheus adopte une conception modulaire et est divisé en quatre modules, module de contrôle de vol, module slam, module de planification et module de détection de cible. Le produit P450 combine le système prometheus pour atteindre un total de huit fonctions intérieures et extérieures, pointage intérieur, atterrissage intérieur, suivi intérieur, évitement d'obstacles intérieurs, pointage extérieur, atterrissage extérieur, suivi extérieur, évitement d'obstacles extérieurs, etc. Réalisez l'ajustement parfait de la simulation à la machine réelle.
Fonctions réalisables : vol stationnaire binoculaire VIO intérieur et extérieur, évitement d'obstacles lidar intérieur et extérieur, atterrissage guidé par vision intérieur et extérieur, détection et suivi de cadre intérieur et extérieur, simulation GAZEBO, évitement d'obstacles visuels fastplanner
Présentation de la fonction P450 :
Module de controle
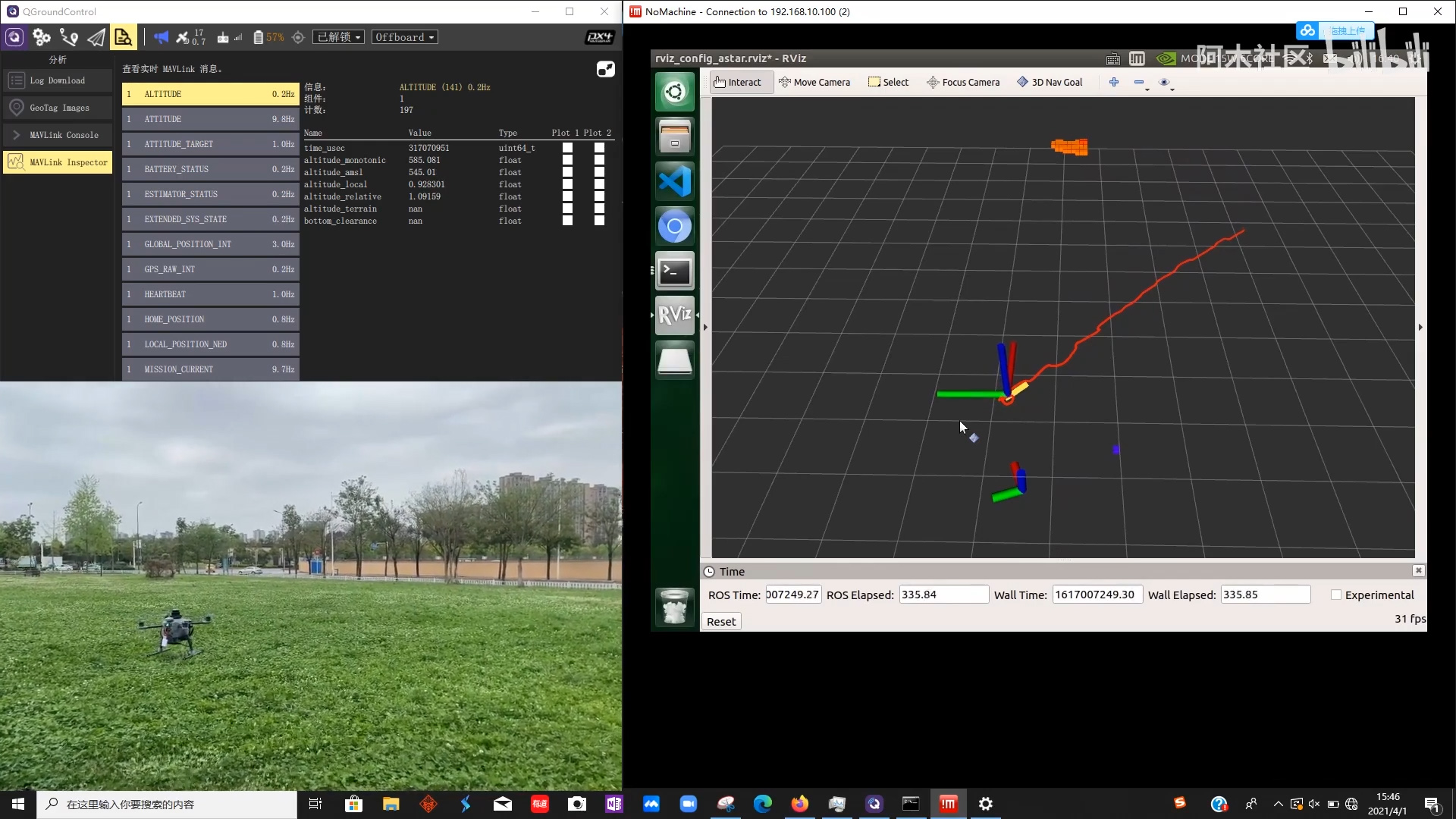
1. Réalisez la communication entre l'ordinateur de bord et le contrôleur de vol à l'aide du package de fonctions MAVROS. 2. Fournir une interface de commande de contrôle simple et pratique, y compris le déverrouillage à une touche, le décollage, le vol stationnaire, l'atterrissage,
Verrouillage d'urgence, commandes de contrôle (contrôle de position, contrôle de vitesse ou contrôle combiné) sous centrale inertielle et système machine, suivi de trajectoire, etc.
3. Instructions détaillées de documentation wiki et commentaires de code, environnement de développement intégré, pas besoin de modifier le code source du micrologiciel PX4.
Module de claquement
Fournir des démonstrations de cartographie riches, y compris la cartographie d'environnement RTAB-Map, Octomap et D435I+T265
Module de planification
1. Fournir une multitude de démonstrations de planification, y compris la planification locale APF, la planification locale VFH et la planification globale Astar
2. Démo d'implémentation de Fastplanner et d'optimisation de trajectoire
Module de reconnaissance de cible
1. Reconnaissance d'images basée sur Opencv, fournissant des démos riches, y compris la reconnaissance numérique, l'ellipse
Détection, détection de code multi-QR, reconnaissance des couleurs, détection de cible générale YOLO, suivi de sélection de trame, etc.
2. Instructions détaillées de documentation wiki et commentaires de code.
Module de tâches
1. Combinez les modules ci-dessus pour fournir des cas d'application simples et riches de la couche application, y compris l'atterrissage autonome, la pénétration de trame circulaire, le suivi des points de cheminement, le suivi des lignes de couleur, la reconnaissance numérique, le suivi de la sélection des trames cibles, la planification des points de cheminement et d'autres démos.
2. Fournissez des instructions wiki détaillées et des commentaires de code, faciles à modifier et hautement réutilisables.
Émulation de belvédère
1. Le système logiciel d'environnement de simulation peut utiliser la technologie de moteur virtuel pour fournir un environnement réaliste, une puissance et une détection simulées, ainsi qu'un contrôleur de vol intégré, ce qui peut simplifier le processus de configuration initiale et faciliter le vol simulé par UAV. Cette fonction peut améliorer l'efficacité des tests de test grâce à des algorithmes de contrôle et d'estimation d'état, ce qui est plus avantageux que le débogage et le développement à coût élevé intégrés.
2. P450 fournit des didacticiels de simulation correspondant aux fonctions réelles de la machine, avec des instructions wiki détaillées pour l'utilisation
Divers problèmes rencontrés dans l'environnement de simulation.
Partie matérielle : conception modulaire, qui peut être associée de manière flexible à un équipement aéroporté. Le corps en matériau composite peut réduire efficacement le poids de l'ensemble de la machine et prolonger efficacement la durée de vie de la batterie. La conception du fuselage semi-fermé améliore encore la capacité de protection et réduit efficacement les interférences du flux d'air